오늘은 jetson nano 개발보드에 ubuntu 18.04를 설치해 보도록 하자. nvidia 사에서 공식적으로 제공하는 JetPack 4.6이 ubuntu 18.04 버전을 기반으로 하기 때문에 결론적으로는 JetPack 4.6을 설치해 보도록 하자. 참고로 nvidia 사에서는 jetson nano에 대한 ubuntu 20.04 버전은 공식 지원하지 않는다. 오늘 사용할 보드는 jetson nano b01 4gb 모델이며 jetson nano 개발보드의 종류는 아래 글을 참조하자.
[jetson nano] jetson nano 종류
오늘은 jetson nano 종류에 대해서 살펴보자. jetson nano가 단종에 들어감에 따라 유통 물량이 부족하여 가격이 많이 높아진 관계로 중고거래를 많이하게 되는데 정확하게 알고 구매하도록 하자. 일
t-shaped-person.tistory.com
1. JetPack 4.6 다운로드를 위해 사이트 접속
JetPack SDK 4.6 Release Page
Follow the steps at Install Jetson Software with SDK Manager. NVIDIA SDK Manager can be installed on Ubuntu 18.04 or Ubuntu 16.04 to flash Jetson with JetPack 4.6
developer.nvidia.com
2. SD Card Image 다운로드(4gb 모델이니까 왼쪽 다운로드) 및 압출 풀기
-. 압축 해제하면 약 12.7gb 크기의 sd-blob-b01.img 파일을 얻을 수 있다.

3. 컴퓨터에 SD Card 연결 (32gb 이상)
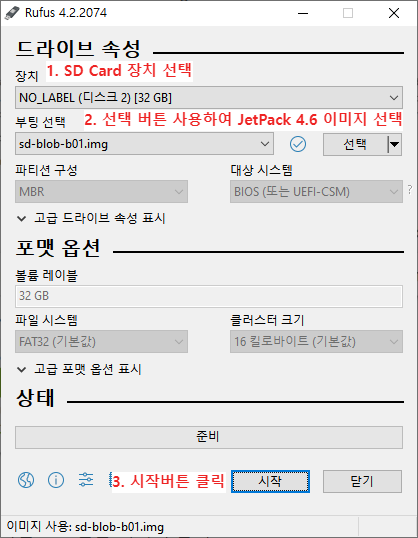
4. rufus 사용하여 SD Card에 다운로드 받은 이미지 굽기
-. 10여분 정도 소요되며 완료되면 프로그램 닫기
5. jetson nano에 SD Card 삽입, wifi 동글 연결 후 전원 On 및 System Configuration 실시
① I accept the terms of these licenses 체크 및 Continue 클릭
② 언어: 기본 English로 Continue 클릭
③ Keyboard layout: 기본 English (US)로 Continue 클릭
④ Wireless: 무선 와이파이 설정은 개인 환경에 맞게 설정하고 Continue 클릭
(jetson nano에 wifi 동글을 연결했을 경우에만 나옴)
⑤ timezone: 지도상에서 Seoul 선택 후 Continue 클릭
⑥ username, computer's name, password 개별적으로 입력하고 Continue 클릭
(참고로 r1mini 모델은 jetson, ros, 1 및 Log in automatically 체크로 설정)
⑦ APP Partition Size: 기본값 사용하여 Continue 클릭
(SD Card를 전체 영역을 사용하기 위해 기본적으로 최대 크기로 잡힘)
⑧ Select Nvpmodel Mode: 기본값 사용하여 Continue 클릭
(MAXN을 선택해야 jetson nano의 최대성능 발휘)
6. 화면 보호기 끄기(성능에 영향이 있다는 낭설이..ㅋ)
-. System Setting > Brightness & Lock > Turn screen off when inactive for: 5 minutes를 Never로 변경
7. os 업그레이드 하기 및 재부팅(인터넷이 연결되어 있어야함)
-. 방법1: 터미널 실행 후 다음 명령어 실행
sudo apt update
sudo apt upgrade -y@ 방법1의 sudo apt update 명령의 경우 간혹 Software Updater와 내부적으로 동시에 실행되어 명령이 제대로 안 먹히는 경우가 있으니 안되면 조금 기다렸다가 다시 실행하도록 하자.
-. 방법2: wifi 연결하면 좀 있다가 Software Updater 팝업이 뜨는데 해당 팝업에서 실행
팝업이 늦게 뜰 수도 있으므로 방법1 추천
@@ 다음 내용: [ros melodic] r1mini(jetson nano)에 ros melodic 설치하기
[ros melodic] r1mini(jetson nano)에 ros melodic 설치하기
오늘은 jetson nano에 ros melodic을 설치해 보도록 하자. ros melodic과 알맞는 조합은 ubuntu는 18.04 버전이다. @@ jetson nano에 ubuntu 18.04(JetPack 4.6) 설치 방법은 아래 링크 참조 [ros] jetson nano에 ubuntu 18.04(JetPack
t-shaped-person.tistory.com
'OMOROBOT > ROS Package' 카테고리의 다른 글
| [ros melodic] r1mini 원격 제어하기 - teleop (0) | 2023.10.20 |
|---|---|
| [ros melodic] r1mini 용 melodic 원격 PC 설정하기 (1) | 2023.10.19 |
| [ros melodic] r1mini(jetson nano) 용 sd card 이미지 파일 굽기 (0) | 2023.10.18 |
| [ros melodic] r1mini(jetson nano)에 melodic 패키지 설치하기 (0) | 2023.10.18 |
| [ros melodic] r1mini(jetson nano)에 ros melodic 설치하기 (1) | 2023.10.17 |