반응형
@@ 아래 그럼처럼 jetson nano에는 2개의 csi camera를 설치 가능하고 위쪽이 CAM1 아래쪽이 CAM0이다.
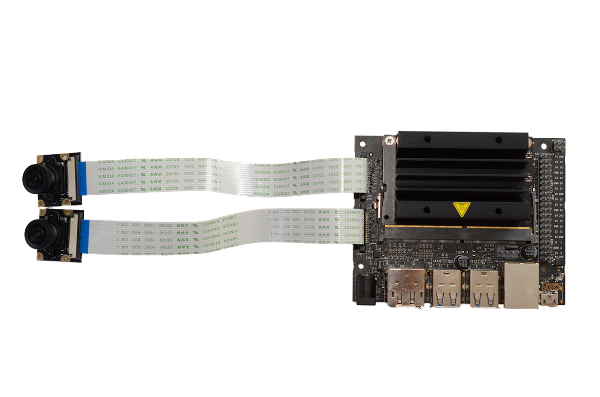
csi camera로는 주로 아래처럼 라즈베리파이용 카메라를 주로 사용하는데 v2 이상만 호환이 된다고 한다. 무턱대고 구매하면 안되고 호환성 여부를 확인하고 구매하도록 하자.

1. jetson nano에 csi 카메라 모듈을 연결하고 CAM0, CAM1인지 연결 포트를 확인하자.
-. jetson nano에서 csi camera 사용을 위한 기본 프로그램은 nvarguscamerasrc이다.
-. 프로그램에서 카메라를 제아할 때는 GStreamer 방식으로 pipeline을 생성하여 사용한다.
2-1. 전체화면으로 실시간 캠 화면 확인을 원할 경우(캠 호환성 여부 확인용)
gst-launch-1.0 nvarguscamerasrc ! nvoverlaysink
2-2. 옵션 지정하여 실시간 캠 화면 확인을 원할 경우
gst-launch-1.0 nvarguscamerasrc sensor_mode=0 ! 'video/x-raw(memory:NVMM), width=3820, height=2464, framerate=21/1, format=NV12' ! nvvidconv flip-method=0 ! 'video/x-raw, width=960, height=616' ! nvvidconv ! nvegltransform ! nveglglessink -e
# 옵션 항목
! 'video/x-raw(memory:NVMM), width=3820, height=2464, framerate=21/1, format=NV12'
! nvvidconv flip-method=0
! 'video/x-raw, width=960, height=616'
! nvvidconv
! nvegltransform
! nveglglessink -e-. 카메라가 2개 설치 되었을 경우 sensor_mode=0, sensor_mode=1로 구분
-. 카메라가 촬영할 해상도 : width=3820, height=2464
-. 카메라가 촬영할 프레임 속도 : framerate=21/1
| 촬영할 수 있는 해상도 별 프레임 속도 | |
| 3280 * 2464 | 21 fps |
| 3280 * 1848 | 28 fps |
| 1920 * 1080 | 30 fps |
| 1280 * 720 | 60 fps |
-. flip-method 옵션
| 0 : none | 4 : horizontal-flip (좌우 반전) |
| 1 : counterclockwise (왼쪽으로 90도 회전) | 5 : upper-right-diagonal (우대각 반전) |
| 2 : rotate-180 | 6 : verticla-flip (상하 반전) |
| 3 : clockwise (오른쪽으로 90도 회전) | 7 : upper-left-diagonal (좌대각 반전) |
-. 저장할 영상 해상도 : 'video/x-raw, width=960, height=616'
728x90
'Jetson & Ubuntu' 카테고리의 다른 글
| [ubuntu] terminal 창으로 wifi 삭제하기 (0) | 2023.06.15 |
|---|---|
| [ubuntu] terminal 창으로 default terminal 변경하기 (0) | 2022.08.13 |
| [ubuntu] terminal 창으로 hostname 변경하기 (0) | 2022.08.12 |
| [ubuntu] ubuntu terminal 창으로 wifi 접속하기 (0) | 2022.08.11 |
| [jetson nano] jetson nano 종류 (0) | 2022.08.10 |